Python controller
Posted: Mon May 09, 2022 3:42 pm
Altitude controller python
hello!
I am doing my internship in drone trajectory control. I have a problem, I'm a bit new in control systems and I have to make a control to improve the trajectory using pyhon code. I know that control can be done with a PID, but it is my understanding that the CF already has Kp, Ki and Kd values determined.
The following image shows a square trajectory (blue signal = CF). How can I improve the trajectory? Where can I start to control the altitude of the drone?
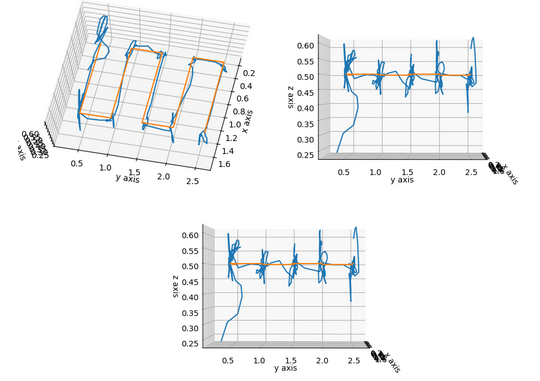
thanks
hello!
I am doing my internship in drone trajectory control. I have a problem, I'm a bit new in control systems and I have to make a control to improve the trajectory using pyhon code. I know that control can be done with a PID, but it is my understanding that the CF already has Kp, Ki and Kd values determined.
The following image shows a square trajectory (blue signal = CF). How can I improve the trajectory? Where can I start to control the altitude of the drone?
thanks