Added Camera overlay to the pc client (now also with video)
Posted: Thu Jan 09, 2014 12:03 am
EDIT: Added video
Hey guys!
Many of you asked / pmed / etc me about my live HUD (http://forum.bitcraze.se/viewtopic.php?f=6&t=491#p3145) so I thought I would integrate a very simple version directly into the client.
Here is the code:
https://bitbucket.org/omwdunkley/crazyf ... e711f6b5dd
Here is a video:
http://www.youtube.com/watch?v=ewN3v4wLO08
and a picture:
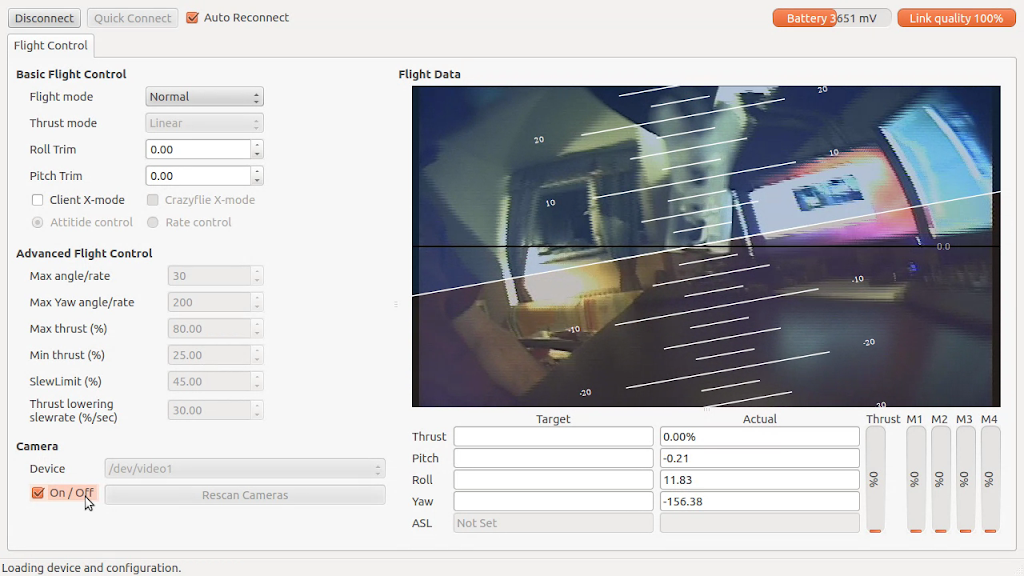
I tried to use the existing libraries as much as possible. So far there are no new dependencies. It uses pygame to query the available cameras and read images from them. It captures at the maximum camera fps, but is capped at 60hz. People had performance problems with the attitude indicator (AI) updating too fast and hogging lots of resources. But to have a good AI+camera overlay (HUD) it needs to update at around 30hz to look good. I reimplemented the repainting logic so it aggregates updates. The IMU data is displayed at 30hz in the AI and around 5hz in the GUI. So hopefully this should work for most people without killing their system. The camera resolution is set to the maximum the camera can handle, capped at 720p. As for now we only know how to add analoge cameras to the flie, so the most commonly used resolution would then be around 720x576.
I wanted to add the functionality to make it full screen but I couldnt figure out how to maximise the widget. So for now if you double click on it it uses the whole tab area by hiding the other elements. Maybe someone else can figure this out?
It is also designed so that if the camera fails it still shows the IMU data and vice versa.
This is just supposed to be a very simple proof of concept to allow others to tinker/extend it.
Lots of things could be done to improve it, eg
- move some of the config data to the menu bars
- display a lot more information in the HUD (as in my c++/ROS version) [temp, pressure, acceleration, altitude, motor power, thrust, heading, compass, inputs, etc]
- add opencv dependencies to clean up the image a lot (eg interpolating the even image rows from the odd ones to remove deinterlacing artifacts)
- add modifiable camera settings (resolution, update rate, etc)
Either way let me know what you think and if you need pointers where to or how to add functionality let me know!
PS: I coded this rather quickly so I have not tested it for strange situations (unplugging the camera while it is streaming, etc)
Cheers
Hey guys!
Many of you asked / pmed / etc me about my live HUD (http://forum.bitcraze.se/viewtopic.php?f=6&t=491#p3145) so I thought I would integrate a very simple version directly into the client.
Here is the code:
https://bitbucket.org/omwdunkley/crazyf ... e711f6b5dd
Here is a video:
http://www.youtube.com/watch?v=ewN3v4wLO08
and a picture:
I tried to use the existing libraries as much as possible. So far there are no new dependencies. It uses pygame to query the available cameras and read images from them. It captures at the maximum camera fps, but is capped at 60hz. People had performance problems with the attitude indicator (AI) updating too fast and hogging lots of resources. But to have a good AI+camera overlay (HUD) it needs to update at around 30hz to look good. I reimplemented the repainting logic so it aggregates updates. The IMU data is displayed at 30hz in the AI and around 5hz in the GUI. So hopefully this should work for most people without killing their system. The camera resolution is set to the maximum the camera can handle, capped at 720p. As for now we only know how to add analoge cameras to the flie, so the most commonly used resolution would then be around 720x576.
I wanted to add the functionality to make it full screen but I couldnt figure out how to maximise the widget. So for now if you double click on it it uses the whole tab area by hiding the other elements. Maybe someone else can figure this out?
It is also designed so that if the camera fails it still shows the IMU data and vice versa.
This is just supposed to be a very simple proof of concept to allow others to tinker/extend it.
Lots of things could be done to improve it, eg
- move some of the config data to the menu bars
- display a lot more information in the HUD (as in my c++/ROS version) [temp, pressure, acceleration, altitude, motor power, thrust, heading, compass, inputs, etc]
- add opencv dependencies to clean up the image a lot (eg interpolating the even image rows from the odd ones to remove deinterlacing artifacts)
- add modifiable camera settings (resolution, update rate, etc)
Either way let me know what you think and if you need pointers where to or how to add functionality let me know!
PS: I coded this rather quickly so I have not tested it for strange situations (unplugging the camera while it is streaming, etc)
Cheers