Photo of in flight (very much pre alpha) HUD while max throttle applied (maximise browser to view full image..):
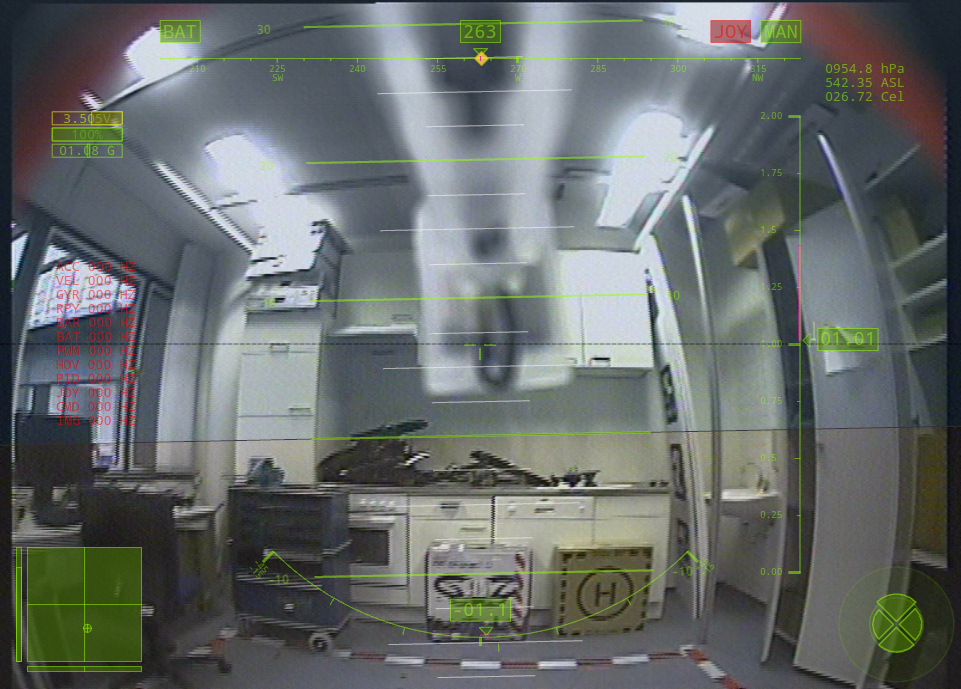
The image shows the hud node, which displays the camera image, optionally rectifying it and doing some really cheap "deinterlacing" - dropping every 2nd row. The image is updated at 25hz. The hud is drawn up to 100hz, the maximum speed at which I can grab the crazyflie IMU, etc data. The hud shows control input data, link/battery status, G, heading, initial heading and direction/distance from it, charge mode/status, flight mode, barometric data, actual thrust data for each motor, an artificial horizon, an altitude indicator (still in progress) and how fast it is receiving which data.
You can actually see that the front motor has to do lots more work - as the camera shifts the center of mass waaay forward!
The hud colours can be changed, screenshots made, etc etc. Still tons of work to do but basic functionality is there.
Photo of flie with FPV parts:
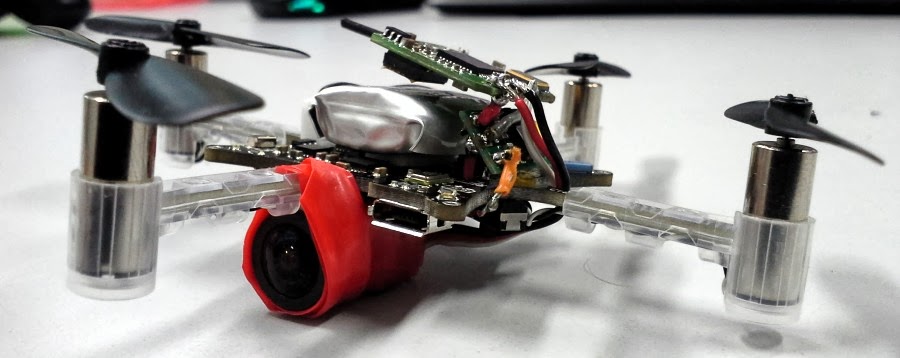
Detail: https://lh3.googleusercontent.com/-1LWK ... se_fpv.jpg
Underside: https://lh4.googleusercontent.com/-A3IG ... om_fpv.jpg - switch is visable and used to turn off fpv system while charging.
720p video of it in action:
http://www.youtube.com/watch?v=AWSUMGJK ... e=youtu.be
Battery life: 2:30 (then noise/cutouts start to appear)
Weight: 24g
Hardware:
- 5V step up voltage regulator: http://www.pololu.com/catalog/product/2115
- Transmitter: http://www.fpvhobby.com/transmitter/21- ... itter.html
- Camera: http://www.fpvhobby.com/63-1-gram-nano- ... 80tvl.html
- Lens: http://www.fpvhobby.com/138-wide-angle- ... amera.html
- Receiver: http://www.fpvhobby.com/20-4-ghz-receiver-module.html
- Digitiser: http://www.amazon.com/Hauppauge-610-USB ... B0036VO2BI
- Some random shift switch
Connections:
- Flie Pin 17 DGNG wired to
- Regulator GND
- TX GND
- Flie Pin 16 VCOM wired to a slide switch wired to
- Regulator VIN
- Regulator VOUT wired to
- Cam VIN
- TX VIN
- TX GND_cam and TX VID wired to Cam GND and Cam VID respectively
Software:
- Flie driver node
- written in python. Communicates with the flie. Advertises crazyflie logs as ROS messages,c hanges params on flie and forwards control commands.
- Dynamic reconfigure
- interface to change flie params (http://ros.org/wiki/dynamic_reconfigure)
- Flie control node
- Listens to joystick messages and converts them into flie commands; has different settings (eg sensitivity, etc)
- C++ GUI node
- listens to logs and camera data, uses QGLWidget to draw everything
- usb_cam node
- outputs digitized image (http://www.ros.org/wiki/usb_cam)
- image_proc
- used to rectify the distorted image (http://www.ros.org/wiki/image_proc)
- ps3joy
- bluetooth driver for sony gamepad (http://www.ros.org/wiki/ps3joy)
Problems:
- Some video dropouts after 2-3 mins when applying high throttle
- Solution -> Not sure yet, need to experiment
- Weight too far forward
- Solution -> Design a proper holder for the camera. Work in progress: Id like to print a 3d model that clips under the flie using the 4 1mm holes in each corner. Ive ordered some prints and will need to experiment with different pins to plug into the holes

- Solution -> Design a proper holder for the camera. Work in progress: Id like to print a 3d model that clips under the flie using the 4 1mm holes in each corner. Ive ordered some prints and will need to experiment with different pins to plug into the holes
For now the cam is attached with cheap tape, just to make the proof of concept vid.
The key here was the pololu 5V step up voltage regulator.
I actually tried a 3.3V voltage regulator, but that didnt work very well and there was still lots of noise.
a 22uH inductor helped with most of the noise, but not the drop outs. I was very happy to not have to use an inductor at all, the v regulator seems to drop all the noise without the need of an inductor! If some one is interested in the progress I have recordings of image/flight data of all previous test flights.
Any ideas on extending battery life would be cool. Id still like to see if I could get that 3.3v regulator working. And Id like to use a smaller transmitter - Ive seen some of you use those 2.4ghz nano ones.
Thanks to MShelley for helping out with the soldering
Thanks CVPR @ TU Munich
And thanks to all of you for all our fpv related discussions on this forum
EDIT: links updated
EDIT2: fixing more dead links..advice: dont use dropbox!


{kind=link}
{kind=link}