Barometer assisted thrust.
Re: Barometer assisted thrust.
I was searching for foam examples on-line. Ive noticed a few post now on the sensor being light sensative too. Under modern lights that may be contributing to noise.
Re: Barometer assisted thrust.
WOW! This makes alot of difference. I'm not sure if it is related to the "wind", "Noise" air flow or blocking out the light. However adding some foam makes a huge difference. I picked some that I could easly breath through and blocked out the light when I held it over my eyes.tobias wrote:I read somewhere that it is good to cover the pressure sensor with some breathing foam or similar to avoid the effect from the airflow from the propellers. Something worth a try to get better reading.
Edit: Foam just like that in the bottom of the Crazyflie shipping box
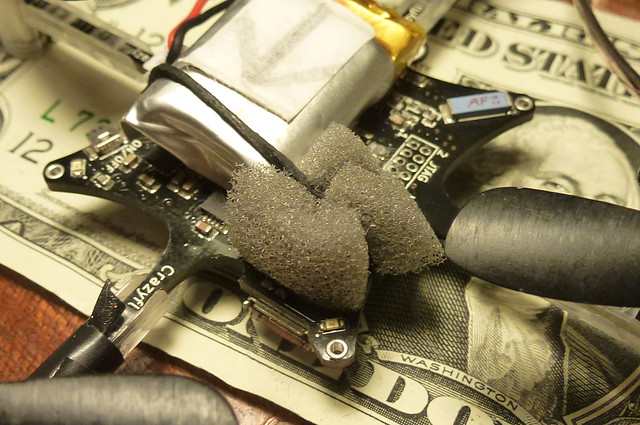
P1040668 by billybag2, on Flickr
-
omwdunkley
- Expert
- Posts: 162
- Joined: Thu Jun 06, 2013 9:56 pm
- Location: Munich
Re: Barometer assisted thrust.
Awesome!
Maybe my environment is too stable")
Cheers!
How did you tell the difference? I just tried too and it helped a little...I think.BillyBag2 wrote:WOW! This makes alot of difference.
Maybe my environment is too stable
Cheers!
Re: Barometer assisted thrust.
It was a quick test, but without is was more unstable and would hit the ceiling or floor. With, the range was much less and it would even hover for a bit.
I have not tuned it under the new conditions. As you say there is still instability.
I am flying under artificial energy saver lights. Not sure how this effects things.
I'm also running weak filters, so this may be my fault. I still think I will hit control loop instability if over filtered.
(simple low pass with an alpha of 0.1)
My pitch roll thrust compensation is still a little high so I need to clobber that a bit more. If I pitch roll it tends to rise.
I think as stability improves the ability to tune increases.
I have not tuned it under the new conditions. As you say there is still instability.
I am flying under artificial energy saver lights. Not sure how this effects things.
I'm also running weak filters, so this may be my fault. I still think I will hit control loop instability if over filtered.
(simple low pass with an alpha of 0.1)
My pitch roll thrust compensation is still a little high so I need to clobber that a bit more. If I pitch roll it tends to rise.
I think as stability improves the ability to tune increases.
-
omwdunkley
- Expert
- Posts: 162
- Joined: Thu Jun 06, 2013 9:56 pm
- Location: Munich
Re: Barometer assisted thrust.
How is your hover implemented? I came up with a rather weird way of hovering, but im interested in other ways
Re: Barometer assisted thrust.
I think I ended up with a PID on thrust based on height error.
This is slightly strainge as the thrust is acceleration and not speed, this is not so clever.
A better way would have a target climb rate that is proportional to height error and then have a PID controling thrust to achieve the climb rate.
The issue I have with this method is I predict the climb rate calculation to ether be very noisy or, if filtered, very laggy. Laggy would make the control unstable.
There is a clever series way to obtain an estimate of the differential at the end of N samples.
http://reference.wolfram.com/legacy/v5_ ... ions.html
However I do not actually have a constant delta T.
This series method would probably give good results as its a kind of clever avarage that trys to predict a value for now based on resent history.
This is slightly strainge as the thrust is acceleration and not speed, this is not so clever.
A better way would have a target climb rate that is proportional to height error and then have a PID controling thrust to achieve the climb rate.
The issue I have with this method is I predict the climb rate calculation to ether be very noisy or, if filtered, very laggy. Laggy would make the control unstable.
There is a clever series way to obtain an estimate of the differential at the end of N samples.
http://reference.wolfram.com/legacy/v5_ ... ions.html
However I do not actually have a constant delta T.
This series method would probably give good results as its a kind of clever avarage that trys to predict a value for now based on resent history.