Search found 5 matches
- Tue Dec 27, 2016 7:32 am
- Forum: Support
- Topic: position estimator
- Replies: 2
- Views: 3932
Re: position estimator
Hi, The Crazyflie source code contains both a complementary filter and an Extended Kalman Filter (EKF). The complementary filter is estimating the orientation. We also have a small complementary filter that estimates the height from the pressure sensor and accelerometer, but not the full position. ...
- Thu Dec 15, 2016 6:03 am
- Forum: Support
- Topic: position estimator
- Replies: 2
- Views: 3932
position estimator
Hi, I think the Crazyflie is using Kalman filter to estimate the position and orientation, I think it could also use complementary filter to estimate the position and orientation, since the complementary file is already given from the source file. But I do not know how to change the crazyflie to use...
- Thu Dec 15, 2016 5:45 am
- Forum: Support
- Topic: Log blocks
- Replies: 2
- Views: 2728
Re: Log blocks
Thank you very much Arnaud!!
arnaud wrote:Hi,
If you go in the menu "settings/open config folder" the recorded log will be in the logdata folder.
/Arnaud
- Fri Dec 09, 2016 1:05 am
- Forum: Support
- Topic: Log blocks
- Replies: 2
- Views: 2728
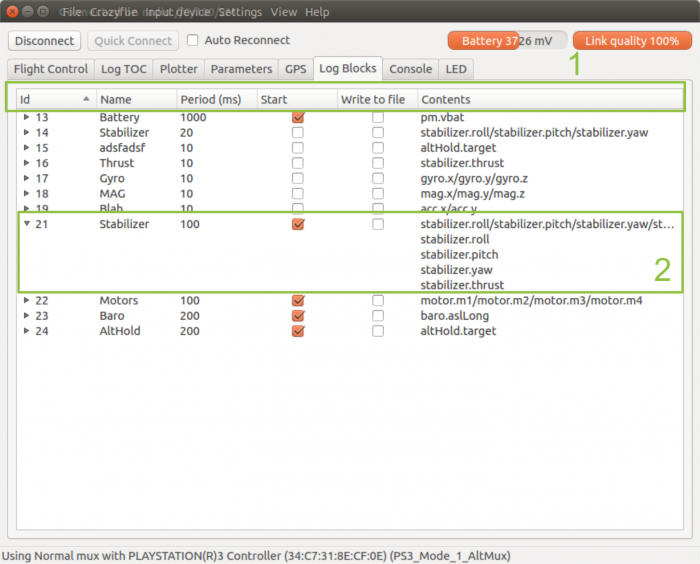
Log blocks
Hi there,
I am trying to use the "Write to file" function to collect the data from IMU,
but I am not sure where are the files.
Thanks,
Jimmy
I am trying to use the "Write to file" function to collect the data from IMU,
but I am not sure where are the files.
Thanks,
Jimmy
- Wed Jul 13, 2016 6:57 am
- Forum: Support
- Topic: VM Virtual Box error
- Replies: 1
- Views: 4561
VM Virtual Box error
I have some problems about running the BM, the details are shown below: Failed to open a session for the virtual machine BitcrazeVM. VD: Backend 'VMDK' does not support discard (VERR_VD_DISCARD_NOT_SUPPORTED). Result Code: E_FAIL (0x80004005) Component: ConsoleWrap Interface: IConsole {872da645-4a9b...